
# 2 程序的中间表示
# 2.1 编译器和静态分析器
# 2.1.1 编程语言的各个层次
我们编写的源文件本质上是一个ASCII码字符串文件,它最终会被转化为二进制比特流以供CPU处理。一般的,需要编译的静态类型语言,其源代码向机器码转化的过程大致如下:
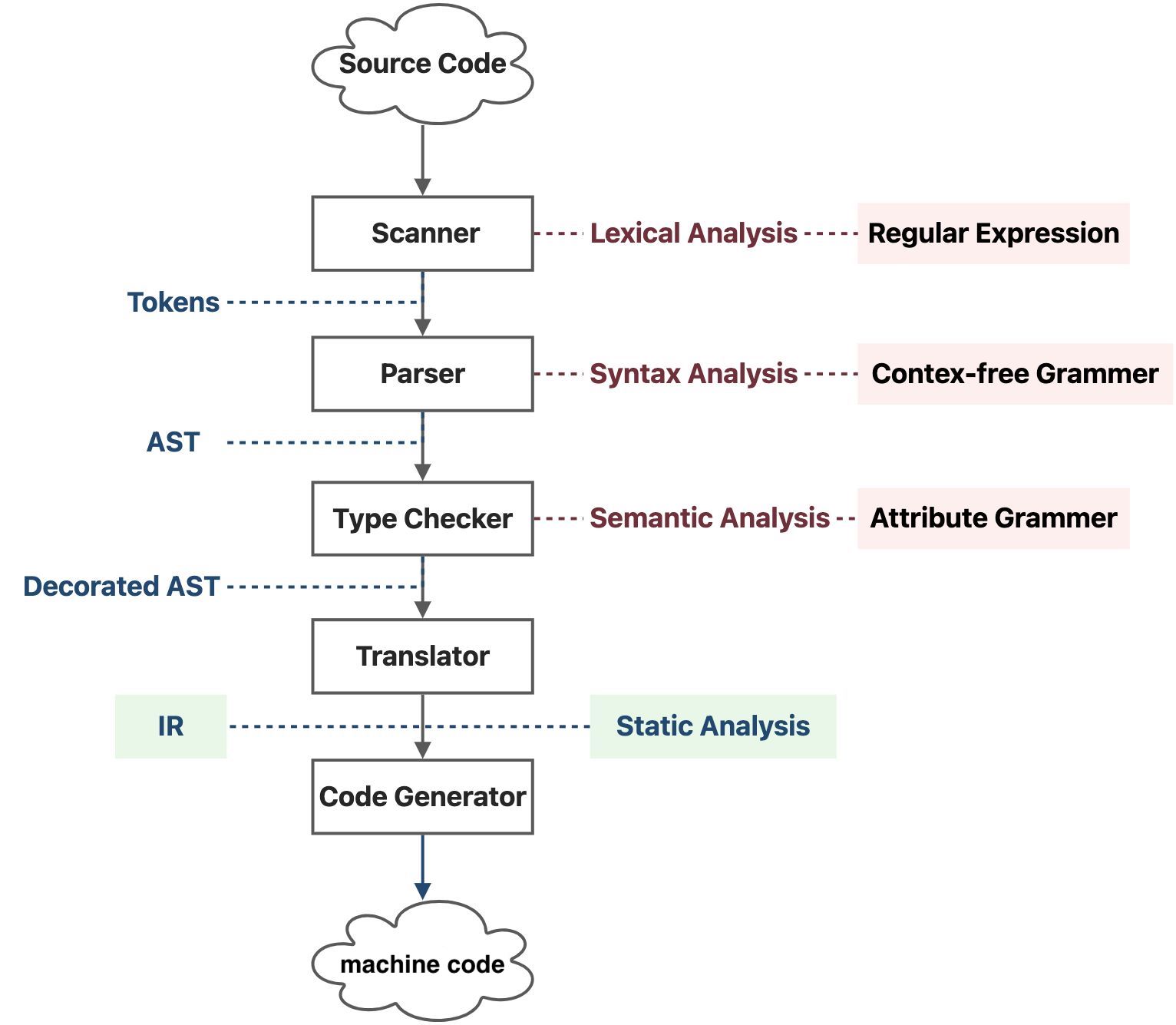
扫描器(Scanner) 扫描源代码,进行词法分析(Lexical Analysis),词法分析会用到正则表达式(Regular Expression),词法分析后的结果为一个标记(Token)串。
解析器(Parser) 遍历标记串,进行语法分析(Syntax Analysis),这里的语法分析分析的是上下文无关的语法(Context Free Grammar),解析器的内部应该是实现了一个有限状态机,用于识别和分析每个语法块格式的正确性,语法分析的结果为一棵抽象语法树(Abstract Syntax Tree, AST)。
类型检查器(Type Checker) 会遍历抽象语法树,进行语义分析(Semantic Analysis),不过编译器的语义分析是简单的,主要是分析属性语法(Attribute Grammar),比如说变量类型,并适当调整一下语法树。语义分析的结果我们称之为装饰过的抽象语法树(Decorated AST)。
翻译器(Translator) 会将抽象语法树翻译成中间表示(Intermediate Representation, IR),IR 的出现解耦了编译器的机器相关(Machine Dependent)部分和机器无关(Machine Independent)部分,上述几个层次在不同架构的机器上面是可以几乎不加改动地复用的。
机器码生成器(Code Generator) 会将 IR 转化成物理 CPU 能够直接执行的比特序列,这个过程是机器相关的。
而静态分析通常发生在 IR 这一层次,这也是我们作代码的机器无关优化的一个层次,同时也是即将生成目标代码的一个层次。不过适合代码生成的 IR 和适合分析的 IR 不一定是同一个,一般来讲抽象层次更低一些的 IR 对于代码生成会更加友好,抽象层次稍高一些的 IR 对于静态分析会更加友好一些。
# 2.1.2 抽象语法树和中间表示的对比
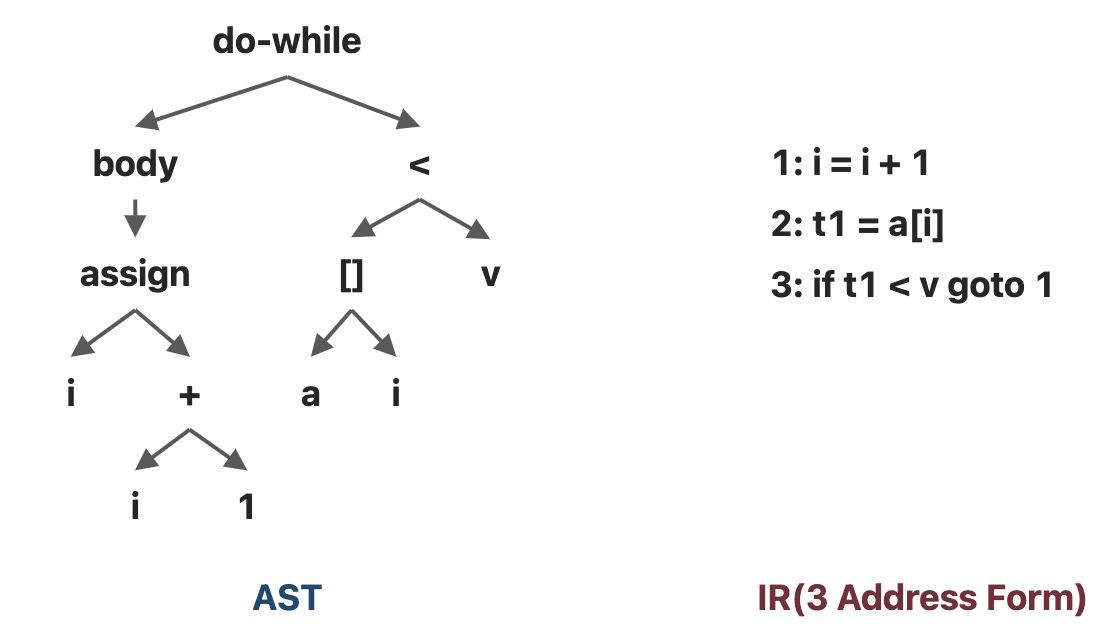
考虑下面一小段代码:
do i = i + 1; while (a[i] < v);
这段代码的AST和IR分别为:
| AST | IR |
|---|---|
| 层次更高,和语法结构更接近 | 低层次,和机器代码相接近 |
| 通常是依赖于具体的语言类的 | 通常和具体的语言无关,主要和运行语言的机器(物理机或虚拟机)有关 |
| 适合快速的类型检查 | 简单通用 |
| 缺少和程序控制流相关的信息 | 包含程序的控制流信息 |
| 通常作为静态分析的基础 |
定义2.1
我们将形如 的指令称为 地址码(N-Address Code),其中,每一个 是一个地址,既可以通过 传入数据,也可以通过 传出数据, 是从地址到语句的一个映射,其返回值是某个语句 , 中最多包含输入的 个地址。这里,我们定义某编程语言 的语句 是 的操作符、关键字和地址的组合。
我们后续使用的是 3 地址码形式的 IR ,一方面是因为一些历史传统,一些经典的分析算法是以 3 地址码作为 IR 的所以这种表示方法就一直沿用着;另一方面是因为它表示上更加简洁方便且表达能力完备。
但是这里需要注意一下的是,IR 不一定非得是 3 地址码, IR 的含义只是“中间表示”而已,只要方便达成你的目的即可,AST,DAG(Directed Acyclic Graph)也是会使用到的 IR 形式,不过最常用的其实还是 3 地址码。
# 2.1.3 3地址码
下面我们具体来看一下3地址码。3地址码中的地址可能有如下的几种类型:
名字(Name),包括
变量(Variable)
标签(Label)
- 用于指示程序位置,方便跳转指令的书写
字面常量(Literal Constant)
编译器生成的临时量(Compiler-Generated Temporary)
每一种指令都有其对应的 3 地址码形式,一些常见的 3 地址码形式如下:
x = y bop z
x = uop y
x = y
goto L
if x goto L
if x rop y goto L
2
3
4
5
6
其中:
x, y, z是变量的地址;
bop是双目操作符(Binary Operator),可以是算数运算符,也可以是逻辑运算符;uop是单目操作符(Unary Operator),可能是取负、按位取反或者类型转换;L是标签(Label),是标记程序位置的助记符,本质上还是地址;rop是关系运算符(Relational Operator),运算结果一般为布尔值。goto是无条件跳转,if... goto是条件跳转。
这里对于一些常见场景的三地址码结构,最好有一个直观的感知,这些场景包括循环结构、分支结构、方法调用和类。其实,如果有一定的汇编基础,对于三地址码的阅读和汇编差不多,甚至比汇编更简单。
这里需要注意一下的是,无论是三地址码还是汇编,其指令类型不取决于具体的语言,而取决于运行这个语言的机器的指令集体系结构(Instruction Set Architecture,ISA),Java虚拟机有自己的指令集体系结构,x86的CPU、Arm的CPU,RISCV的CPU也都有着自己的体系结构。这个运行语言的机器可以是物理机(比如说CPU),也可以是虚拟机(比如说JVM-Java Virtual Machine)。
# 2.1.4 静态单赋值表示
静态单赋值(Static Single Assignment,SSA) 是另一种IR的形式,它和3AC的区别是,在每次赋值的时候都会创建一个新的变量,也就是说,在SSA中,每个变量(包括原始变量和新创建的变量)都只有唯一的一次定义。
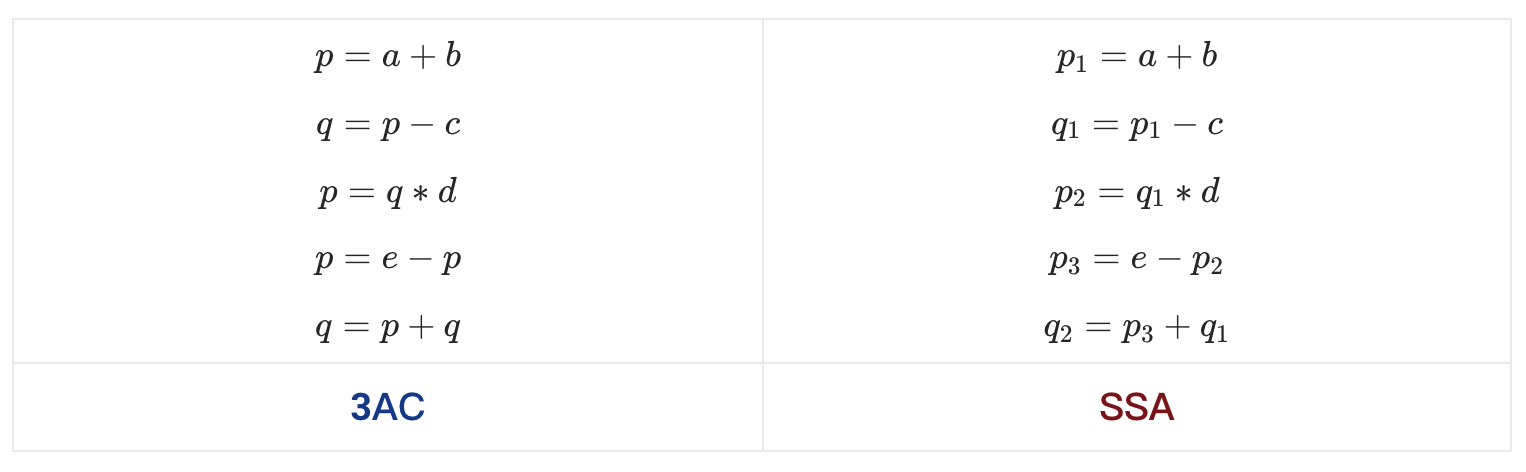
当控制流汇合(Merge)的时候,我们会用一个特殊的操作符表示汇和后的定义:
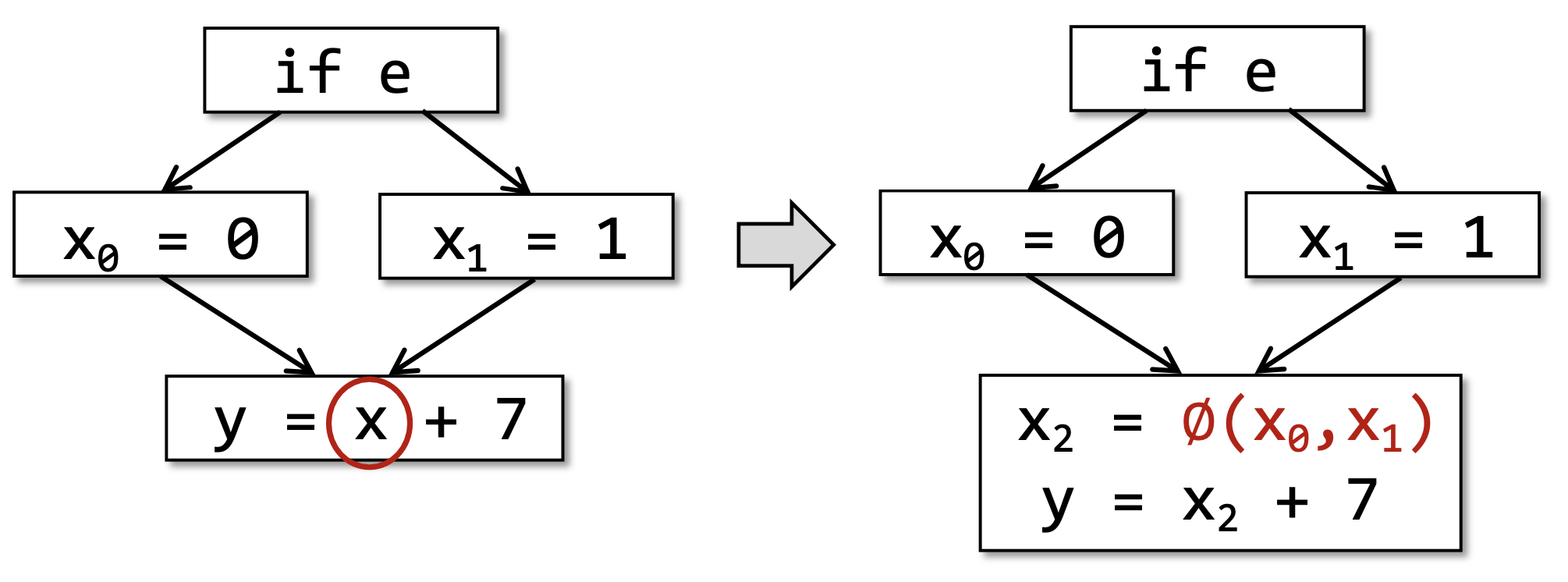
关于SSA,我们只要简单了解一下定义和优缺点就可以了,之后还是用3AC比较多。
优点:
控制流的信息间接地被包含在了独特的变量名之中
- 当我们做一些对控制流敏感的分析的时候,这些信息可能会有帮助
定义和使用的关系明确
缺点:
可能会引入过多的变量名和函数
被翻译成机器码的时候效率低,因为有太多对于程序执行来说不必要的赋值
# 2.2 控制流分析
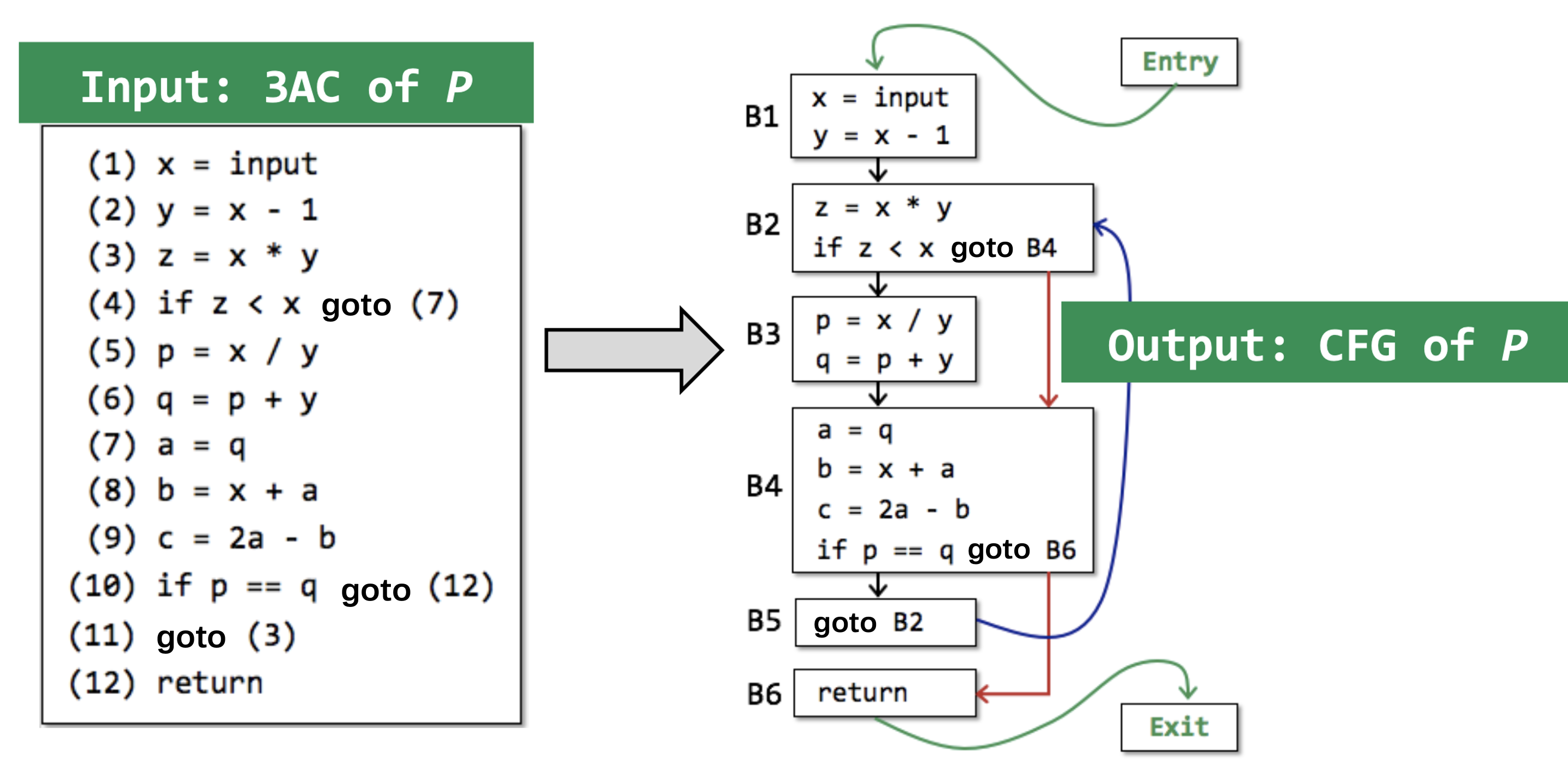
控制流分析(Control Flow Analysis, CFA) 通常是指构建 控制流图(Control Flow Graph,CFG) 的过程。
# 2.2.1 基块
CFG是我们进行静态分析的基础,控制流图中的结点可以是一个指令,也可以是一个基块(Basic Block)。
定义2.2
记一个程序 在IR表示下 的指令序列为 ,这里 是一个有序集。我们定义
- ,其中 表示控制流中 的下一条指令;
- ,其中 表示 的上一条指令。
如果连续的指令序列 的满足如下性质:
并且 和 都不满足上述性质,则称 为基块(Basic Block)。
简单理解,基块就是满足如下性质的最长指令序列:
程序的控制流只能从首指令进入
程序的控制流只能从尾指令流出
于是我们可以直观的感受到,跳转指令会将一个完整的程序块切割为几个基块,如果我们能够把基块的分隔点找出来,那么整个程序P就可以被我们转化成许多的基块了。
定义2.3
对于IR表示下的程序 ,考虑某个基块 ,我们称 为 的基块 的领导者(Leader)。
定理2.1
考虑程序 中所有的领导者组成的集合为 ,则
其中, 表示指令 的类型,jump类型是跳转指令,包括条件跳转(Conditional Jump) 和 无条件跳转(Unconditional Jump), 仅用于 是跳转指令的时候,表示 的目标指令。
简单理解,一个基块的领导者就是这个基块的首指令,整个程序中的领导者有如下3种:
整个程序的首指令;
跳转指令(包括条件跳转和无条件跳转)的目标指令;
跳转指令(包括条件跳转和无条件跳转)紧接着的下一条指令。
定理2.2
考虑程序 中所有的领导者组成的集合为 ,则有
简单理解,从一个Leader到紧接着的下一个Leader之前的所有指令组成了一个基块。
基于定理2.1和定理2.2,我们可以设计出一个寻找基块的算法:
算法2.1 基于中间表示的基块构建算法
算法的时间复杂度为 。
在实际实现过程中,由于保证前个指令的Leader数量不超过个,因此在第二重循环中一定保证恒成立。因此,IsLeader和L可以合并使用,上述伪代码出于方便理解考量下未能如此实现。当然空间复杂度一样为 。
# 2.2.2 控制流图
定义2.4
记程序 的基块组成了集合 ,考虑图 ,其中 ,满足
其中, 表示基块 的首指令(也就是Leader), 表示基块 的尾指令, 表示指令 紧随其后的指令。其余记号含义同定理2.1。
如果 ,我们称 是 的 前驱(Predecessor) , 是 的 后继(Successor) 。
对于图 中所有入度为0的点(一般只有一个),考虑虚拟结点 入口(Entry) ,所有的 入度(In Degree) 为0的点都是Entry的后继;
对于图 中所有出度为0的点(可能不止一个),考虑虚拟结点 出口(Exit) ,所有的 出度(Out Degree) 为0的点都是Exit的前驱。
记 则我们可以定义 控制流图(Control Flow Graph) 为 ,其中
简单理解上述定义,程序控制流的产生来源于两个地方:
天然的顺序执行
- 这是计算系统天然存在的一种控制流
跳转指令
- 这是人为设计添加的一种控制流
基于上述定义,我们可以得到构建CFG的算法:
算法2.2 基于基块的控制流图构建算法
这个算法的时间复杂度为 。
其实,从计算机硬件的角度分析,程序的控制流体现在 程序计数器(Program Counter, PC) 的增减上。 每一种架构的CPU都会有PC,比如说x86的CPU用EIP(Extended Instruction Pointer)作为PC,RISCV的CPU用IR(Instruction Registor)作为PC,JVM应该也应该有对应的PC存在。
# 2.3 自检问题
编译器(Compiler)和静态分析器(Static Analyzer)的关系是什么?
三地址码(3-Address Code, 3AC)是什么,它的常用形式有哪些?
如何在中间表示(Intermediate Representation, IR)的基础上构建基块(Basic Block, BB)?
如何在基块的基础上构建控制流图(Control Flow Graph, CFG)?
← 1 静态分析概述 3 数据流分析-应用 →